0 Items / €0.00
14.06.2021
 CONTENTS:
CONTENTS:
When adding elementary operations of movement, errors of each individual manipulation are included in the general task. This can result in a complex mechanism stopping. Avoiding errors requires reliable feedback, which is paramount to any technical challenge. A separate requirement regarding the operation of technological units is the optimization of the time of movement along a given trajectory.
To solve such a problem, it is necessary not only to accurately estimate the speed of movement of the aggregate units, but also to provide a linear characteristic for assessing the position of the mechanism in a wide range of speed variation. The typical and least expensive solution is to use a special encoder.
When we talk about encoder's construction and working principle, one of the basic characteristics that always matter is the encoder output signal. Due to it, all the further data implementation depends. As there are lots of options among various encoders starting from their signal type and ending with constructive peculiarities, it is necessary to get through them to be sure you are choosing the right option for your industrial system's goals.
Encoders are sensors that help in positioning moving parts of a motor or rotary elements of each industrial system. They are based on one of the following principles: either magnetic principle or optical one.
Nevertheless, which type of encoder do you intend to use, it is necessary to know what type of encoder signals does it provide. Each encoder gets a certain number of impulses that are decoded into the parameter of a motor movement. Then, impulses are transmitted to the drive to provide decoded information quickly and precisely.
Starting with basic things, all encoders are divided into 2 categoria.
Based on the analysis of the technical documentation of the encoder manufacturers, in particular, the following classification of incremental encoders by the types of output stages can be proposed.
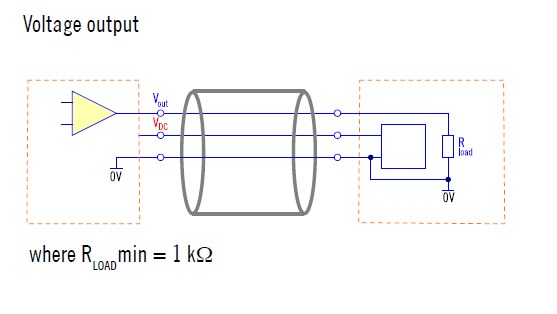
An output signal with a voltage level determined by the value of the encoder supply voltage can be directly applied to the measuring circuit. The load current, in this case, is no more than ten milliamperes. When connecting the encoder signal to several devices at the same time (for example, a PLC and a frequency converter), the permissible load capacity of the output stage must not be exceeded. The disadvantage of this type of output is the large output resistance in the closed state of the transistor VT1, which is determined by the resistance in the collector circuit, which is of the order of thousands of ohms. As a result, the current supplied to the load decreases and the charging time of the load capacitor increases, which reduces the overall response time.
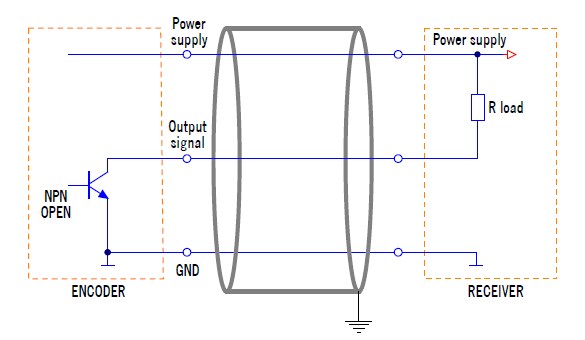
This type of output allows you to receive a signal with a voltage level determined not by the value of the encoder supply voltage, but by the voltage of the additional power supply. To do this, it is necessary to connect an external resistor between the power supply circuits (power) and the output, the resistance value of which is determined by the voltage value of the additional power source. It is also possible to switch a load between the encoder output and the auxiliary power supply. The load current in this case with an open collector output also makes it possible to connect, if necessary, several encoders to one counter input.
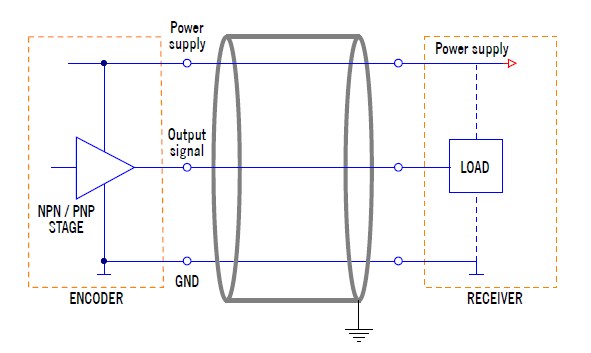
Push-pull (cascade, Totem Pole) output. This type of output is built on transistors of various conductivity and has a low output resistance (both in the state of logical zero and in the state of logical unity), which allows increasing the current supplied to the load. Thus, the load capacity increases and the processes of charging and discharging the load capacity are accelerated, and, consequently, the speed of response increases.
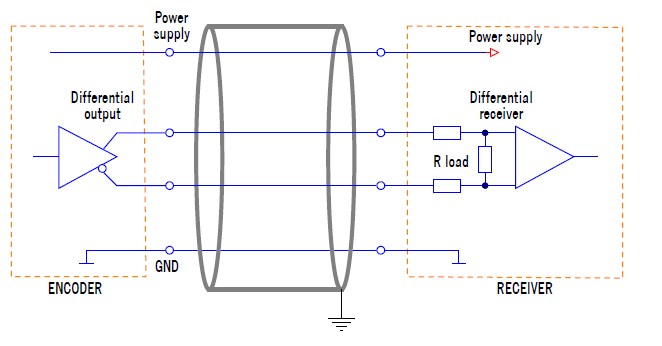
Differential output (line driver output, RS-422 connector output). In this case, in addition to the main one, a second output is added, which inverts the output signal. To process two signals, it is necessary to have an appropriate receiver in the measuring circuit. This type of output is used in environments where there is a high probability of interference and interference can be expected on signal wires, or with very long connecting wires. The value of the output signal level for some types of incremental encoder outputs can also be denoted as TTL (corresponds to a supply voltage of 5 V) or HTL (corresponds to a supply voltage in the range from 10 to 24 V). Typically, 24 V signals are used to feed the PLC digital inputs.
As for special types of output signals provided for certain automation protocols, there we can distinguish the following types:
• The sine-cosine output that is typical for resolvers,
• Parallel output signals,
• SSI interface output signal,
• DRIVE-CLiQ option,
• RS-422 (TTL) output,
• EnDat output standard,
• HIPERFACE output signal type,
• PROFIBUS encoder signal,
• DeviceNet option,
• CANOpen signal.
As for them, they relate to differential output signals' type.
When choosing the encoder, considering an output signal type is essential along with the type of encoder, its shaft parameters and protection level. If you are not sure what type and model of encoder to choose, better consult Eltra's pros to get even fuller information about signal types and other features that impact the choice.