0 Items / €0.00
01.03.2020
Encoders measure an angle of rotation of its shaft (rotary) or distance on scales (linear).
CONTENTS:
Let's look at the main types of encoders. They are divided by technology, design and the principle of coding position. A fundamental difference between incremental and absolute encoder is the method of coding each position and reference points.
You can read about positioning coding in the article Absolute vs Incremental encoder. According to the applied technologies, encoder results are divided into:
Magnetic encoder technology uses magnetic fields to produce results. Magnetic poles (north and south) are placed on the scale. Special Hall sensor reads passage of such poles past a certain point.
Optical encoder technology uses an optical signal that comes from a source to receiver through a disc. The disc or scale has transparent or opaque marks. A ray from source passes or does not pass through them and receiver fixes it.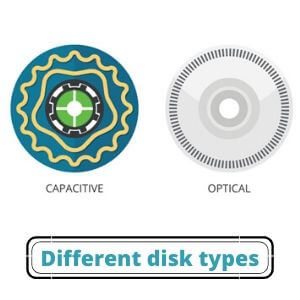
Inductive encoder technology responds to presence of ferromagnetic or electrically conductive metal at certain point. Such sensors work via coils and electromagnetic fields.
Capacitive encoder technology has a sinusoidal rotor. When it rotates, transmitter signal is simulated. Its sensor tracks changes in capacitance on the receiver board and translates them into a signal.
Resistive encoder technology uses shaded areas of conductive material and unshaded areas of insulating material on its scale. When sections pass through a certain point circuits of sliding contacts encounter to conducting and non-conducting areas. The results are translated into digital or analog signals.
Mechanical encoder technology uses metal discs and sliding contacts for measurement. When the disc rotates, some contacts met with metal surface, and some fall into gaps. Each contact is connected to a separate electrical sensor that generates a signal.
Encoders are divided by structure into rotary (shaft) and linear ones.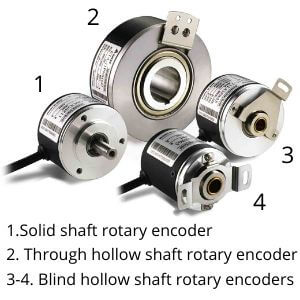
Rotary encoders have a disc with marks that is attached to their shaft. That is why they are called shaft encoders. The shaft is rotated and disc is rotated with it. Disc contains special marks on its surface where their position is encoded. A signal (for example, a ray of light) passes or does not pass through these marks when they are opposite it. The receiver reads these signals.
A mechanical connection is used to mount encoder to a measuring object. For such purpose, there are several designs of shaft encoders:
To remove axial and radial displacement, as well as to make the connection more reliable, additional parts are also used, for example couplings.
Linear encoders have a scale or tape instead of disc. Such tape moves through the encoder or vice versa, encoder moves along the tape. That movement always occurs along one axis. On the tape, there are marks (similar to the marks on discs) with coding about position.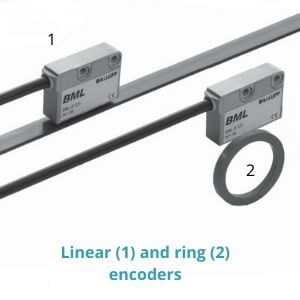
Ring encoders stand out as a separate group. They use linear principle of operation, but actually perform work of a rotary encoder. It is necessary when you need to measure rotation of a shaft, tube, etc. with a large diameter. Its principle was considered in the following article: Ring Encoders.
The type of coding that marks these positions can be incremental or absolute. Both coding principles are available for rotary and linear measurement. They differ only in the part on which they are placed (disc or scale).
On our site, you can find a wide assortment of Eltra Encoders. We supply sensors of various technologies to almost any country. Call now and our managers will help you!