0 Items / €0.00
06.05.2020
CONTENTS:
Resolver and encoder perform the same function and transmit feedback on the angle of rotation and rotation speed of their shaft (rotor). In this article, we look at their differences according to the following characteristics:
First, we consider short definition of encoder and resolver, and then look at the differences for each characteristic.
Resolver is a rotary transformer that determines the angle and displacement speed of its rotor. Its design is similar to a small synchronous motor.
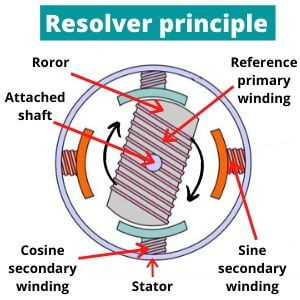 The key parts of resolver structure are:
The key parts of resolver structure are:
Stator is a fixed part of design. It has connection to an AC power source. Primary and secondary windings are located here. The primary winding of stator (Exiting) induces current to a primary winding of the rotor (reference) in form of sinusoidal signal. It is also called Input Sin Signal.
Secondary windings (SIN and COSINE) receive feedback from the rotor winding. They are stationary coils that give output sine and cosine signals. These coils are located at 90° relative to each other.
Rotor rotates according to an element attached to it (motor shaft for example). Depending on its displacement, the signal from the secondary windings changes in accordance. Resolver for each position gives a unique ratio of such Sin and Cos signal. Therefore, device can determine actual shifting angle and rotation speed of the rotor. Hence, it transmits the absolute position using an analog signal.
RDC (resolver digital converter) or DCP (digital signal processor) are necessary devices for connecting resolver to a controller or an industrial PC. Such equipment converts an analog signal to more understandable for industrial systems digital one.
Due to its reliability, resolvers are used in the most demanding and dangerous industries (metallurgy, military, space industries, etc.), where stability and strength are required.
Encoder determines an angle of rotation of its own shaft. As a resolver is a rotary device, let's look only at rotary encoders. There are many encoder types according to operation and sensing principles. Manufacturers produce optical, magnetic, inductive, capacitive, resistive, and even mechanical types. Each of them has its own features. We have already described this in detail in the following article: Types of encoders.
However, the working principle and main parts of all types are quite similar. Here are the common main parts of encoder: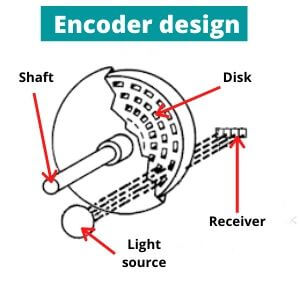
Shaft is mechanically connected to another device and rotates equivalently with it. A disk is attached to the shaft.
Disk has special marks on its surface through which the beam from a source (e.g. in optical types) passed or does not pass into a receiver. In these marks, a shifting angle of the shaft is encoded.
Source and Receiver are located on opposite sides of disk. It rotates between them.
Electronic interface determines the information and transfers it further to the control system.
Encoders are also divided into incremental and absolute. Incremental devices measure the rotation from a specific reference point (so-called zero point). Absolute encoders have a unique code for each position (angle). Multi-turn encoders can monitor data during several revolutions. Here is a detailed article about it: Absolute VS Incremental.
Due to its versatility, encoders are used in all industries and are limited only by environmental conditions.
Ok, here is the part all you are waiting for! We figured out the principle of operation and design of both devices. Let's look in key pros and cons of them deeper.
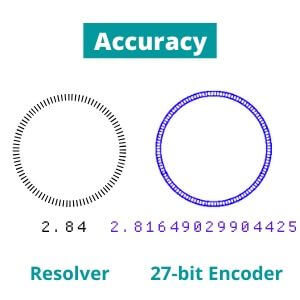
Encoder accuracy varies mainly by disk model. Resolution of some devices can reach 10,000 ppr and even more. The best optical models can produce value of 27 bits. See also: Encoder PPR and CPR meaning
Accuracy of resolver depends mainly on the number of its poles (on sin/cos secondary windings). The more poles are located on its stator, the more accurate its signal can be. However, this is most often still less than on the equivalent encoder.
The most accurate encoders (optical) are very dependent on the contamination and temperature. Magnetic ones, for example, have greater strength, but also have own bottom line. In general, after temperature level above 120 °C (248°F), using encoders is very difficult. Mechanical shocks and vibration have significant influence on its results.
Resolvers have neither electronics nor sensitive elements in their structure. Therefore, they are much more reliable. Such equipment can work optimally in extremely harsh conditions. It is resistant to vibration, pollution, very high temperatures and even radiation.
Encoders have more complicated details to manufacture, so they are more expensive. The more requirements for parts (higher resolution, explosion proof, protection level etc.), the greater price, respectively.
Resolver has a simpler design, so it is cheaper. Repair and maintenance of it will also cost less. However, it is worth mentioning that to connect it you will need to buy additional equipment.
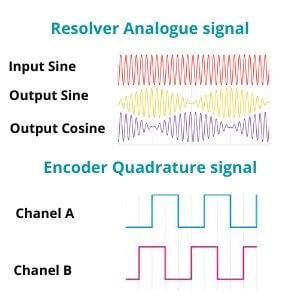 Encoders most often work with a quadrature digital signal. It will be enough to connect them to a controller, and they will transmit values to it (ppr, lpr, rpm, etc.). To do this, they do not require additional equipment.
Encoders most often work with a quadrature digital signal. It will be enough to connect them to a controller, and they will transmit values to it (ppr, lpr, rpm, etc.). To do this, they do not require additional equipment.
Resolvers work with an analog signal. For their integration into some industrial systems with a digital signal, additional RPC or DSP converters are needed. To connect it directly to the controlling device, it is necessary to check that such device directly receives Sine and Cosine signals and has suitable software.
Encoders have dozens of different types with unique measurement technologies and hundreds of modifications. Multi-turn absolute devices can count a number of revolutions in addition.
Resolvers have just a few types. According to the number of poles, there are two-pole or multiple types. According to the operation principle, there are also two main categories: Receiver and Differential.
So, the choice of needed device depends on two key factors:
As resolvers have an analog signal, they can replace encoders only when the control device can receive sine/cosine signals and have similar hardware. In other hand, they need to be used in conditions of a high level of vibration, temperatures over 120 degrees Celsius (248 Fahrenheit), contamination, and mechanical shocks.
Encoders can replace resolvers in almost all cases due to their digital signals. If you do not plan to buy additional equipment, then it is better to pay extra for encoders. They are produce results that are more precise. Due to numerous types, you can choose the most optimal series for your specific conditions.
On our site Eltra-encoder.eu you can find encoders of various types by Eltra.
Great post!